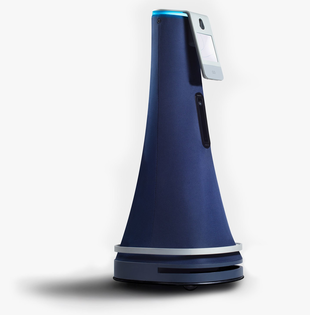
Cobalt Security Robot
|

Early Inspiration?
|
Not Robby the Robot
|
I've been focusing recently on how semi- or fully autonomous robots can fit into the modern workplace, performing jobs that are simply not ideal for humans. Yes, yes, yes! I am aware of the issues about displacing low-paid workers performing menial tasks, but I hope we can avoid the mistakes that led to the Luddite rebellion and do a better job of incentivizing and empowering the youth and unemployed of today to learn the skills for more fulfilling work.
That said, I am considering the value proposition of robots; unpacking what they are good at and where that fits into the modern workplace. Most of today's autonomous enterprise robots are basically some variation on rolling fire hydrants. They all remind me a bit of the Daleks from Dr Who, except that they don't go round screaming "Exterminate! Exterminate!" They do all have the very same problem with stairs, though. But any job that involves rolling around on a flat surface and collecting or providing information is ideal, as sensing technologies and lightweight displays are commoditizing as components that can be added on to robots. Components can be assembled to work together far more simply than has been possible in the past, using ready-made middleware such as ROS (robot operating system) as a platform for developing functionality. Viable applications for things like limbs or grabbers are a bit more challenging, though, as they are not yet ready-made with any kind of built-in sensing or reflexive intelligence and can only perform fixed routine movements. You have to arrange everything that a robot interacts with just so, as it has no ability to adapt to its environment and will happily knock things or people over, crush or stab them if they are out of place (a fact that Simone Giertz has amusingly demonstrated over and over). So any usefully context-sensitive movement must be remote controlled (very slow and impractical, given network delays) or requires a lot of complex sensor technology and programming. Thus, we're not seeing affordable autonomous robots that can, for example, pick things up and carry them yet. In other words, we can't expect to see anything like Robby the Robot wandering around the office doing helpful chores. |

Robby the Robot from the 1956 film, Forbidden Planet, is the canonical humanoid bipedal robot that is too difficult and expensive to engineer to have practical applications for the foreseeable future. |
Hive Mind, Total Recall
When considering autonomous robots in the workplace, the first thing to remember is that they are networked devices so they can operate like the Borg in Star Trek or the robots from the movie I, Robot. Once one of them learns something, it's possible for all of them to have access to the new information and for it to be stored indefinitely. This means that, once they become commonplace, you may be able to treat all robots as the same persona, should you wish to befriend them. If you are in a retail store that has a customer service robot like Fellow Robot's, all of the robots in the store could continue the same dialog with you days or years later, if you ask for assistance as you move around or revisit the store.
Do we want this?
Probably not. It means that we have to design the limits of this kind of omniscience as robots can potentially have total recall of everything everywhere. This could be extremely useful and/or extremely invasive of privacy and very hard for humans to wrap their heads around. Someone is going to have to think long and hard about this problem space.
Do we want this?
Probably not. It means that we have to design the limits of this kind of omniscience as robots can potentially have total recall of everything everywhere. This could be extremely useful and/or extremely invasive of privacy and very hard for humans to wrap their heads around. Someone is going to have to think long and hard about this problem space.
Autonomostly and Autonominimal
Another consideration is that robots can be autonomous or not to any degree we decide to design them for. Think about Tesla's cars that mostly drive themselves (terrible idea, by the way). Human Robot Interaction is not just about interactions modeled on human-human interaction, it is also about how much a human is controlling a robot's behavior or supervising its decision making.
A fully autonomous robot would be the Savioke Relay delivery robot that was pictured on my home page and which is topped by a container that can be opened to have items placed in it and then locked while the robot delivers the items to wherever the robot is instructed to go. Perfect for hotels or hospitals.
A fine example of autonomostly is Cobolt Robotics' security patrol robot which has lots of sophisticated sensing technology so that it can act as a security guard spotting anomalies in your office building at night and challenging people to confirm their identity. When it encounters a situation that it doesn't know how to handle, a human operator is brought into the loop to determine what action to take.
Alternatively, we have autonominimal robots such as telepresence robots like the Beam, Double or Ohmni robots that self dock for recharging but are mostly controlled by their user.
And we can imagine anything in between those extremes...
This is a really interesting design space where humans can greatly expand the capabilities of robots and vice versa. The challenge is to avoid the problems of lack of situation awareness at handover time that Tesla had to deal with when inattentive drivers were caught off guard with very dangerous results. Indeed, the notion of handover may not be temporally defined, but it can be functional in many applications, for example, a telepresence robot could be under tight control of its user but have reflexes to stop it bumping into furniture and other people. So the human hands off low level reflexes to the machine so she can concentrate on interacting with other people.
A fully autonomous robot would be the Savioke Relay delivery robot that was pictured on my home page and which is topped by a container that can be opened to have items placed in it and then locked while the robot delivers the items to wherever the robot is instructed to go. Perfect for hotels or hospitals.
A fine example of autonomostly is Cobolt Robotics' security patrol robot which has lots of sophisticated sensing technology so that it can act as a security guard spotting anomalies in your office building at night and challenging people to confirm their identity. When it encounters a situation that it doesn't know how to handle, a human operator is brought into the loop to determine what action to take.
Alternatively, we have autonominimal robots such as telepresence robots like the Beam, Double or Ohmni robots that self dock for recharging but are mostly controlled by their user.
And we can imagine anything in between those extremes...
This is a really interesting design space where humans can greatly expand the capabilities of robots and vice versa. The challenge is to avoid the problems of lack of situation awareness at handover time that Tesla had to deal with when inattentive drivers were caught off guard with very dangerous results. Indeed, the notion of handover may not be temporally defined, but it can be functional in many applications, for example, a telepresence robot could be under tight control of its user but have reflexes to stop it bumping into furniture and other people. So the human hands off low level reflexes to the machine so she can concentrate on interacting with other people.
As I have time, I hope to add more musings to this page.